三月份的时候,Yamaha 公开了他们正在开发的 AMSAS(Advanced Motorcycle Stabilization Assist System,先进的摩托车稳定辅助系统)驾驶安全辅助系统。
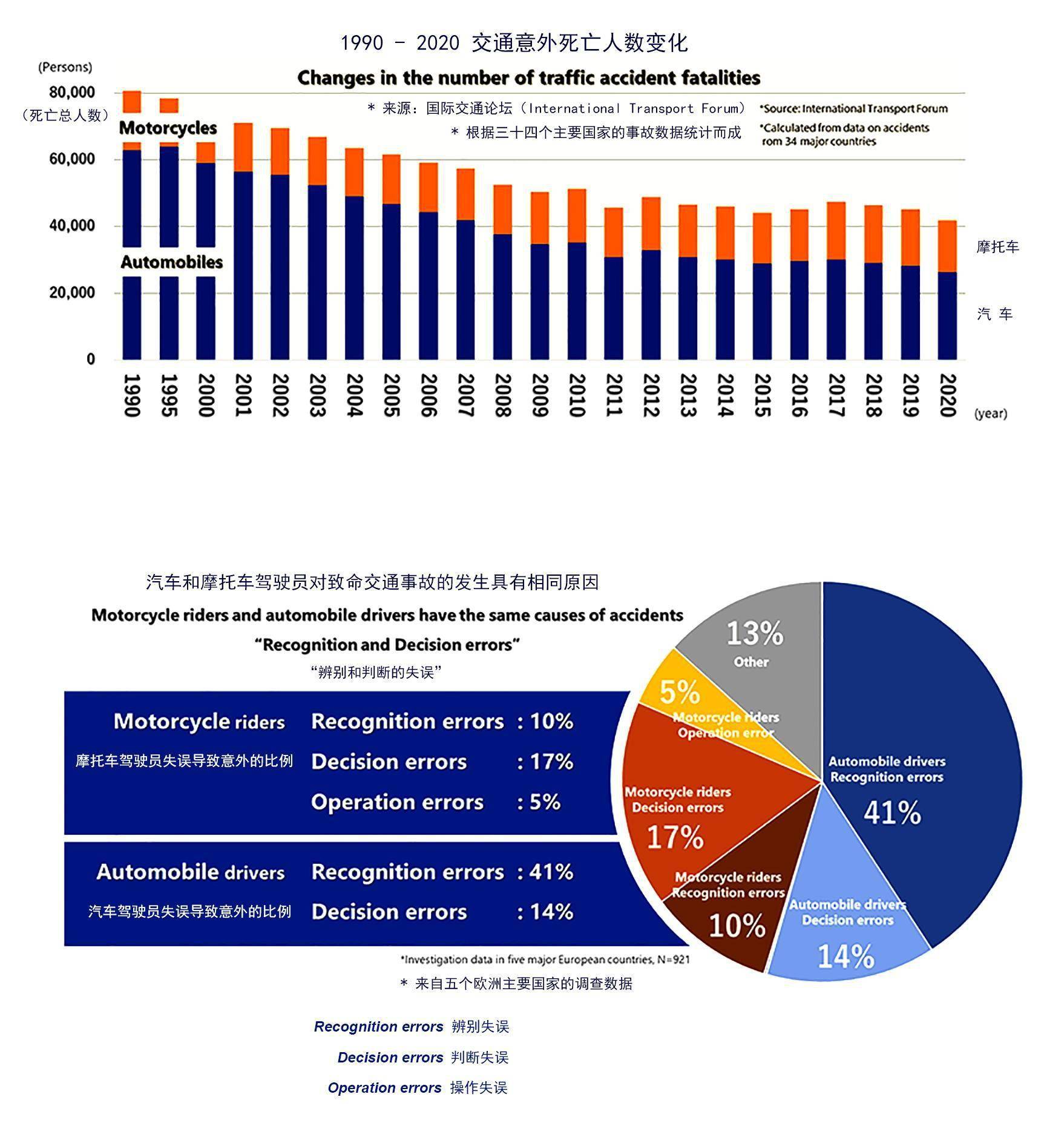
这一系统的开发背景,是根据国际交通论坛(International Transport Forum)的一份研究报告:1990 - 2020 年汽车摩托车致命交通意外数据统计。该报告显示,这一时间段里,虽然因为车祸而死亡的总人数正在缓慢下降,但与摩托车相关事故的死亡人数却略有增加。
对部分欧洲主要国家的数据分析中显示,致命的摩托车事故里面,其中大约 30% 是由于摩托车驾驶员的错误或疏忽引起的,但超过 50% 的致命意外,是由于汽车驾驶员的错误或过失而导致。
基于这些背景,Yamaha 认为:
1、必须采取的第一步,是消除驾驶员在判断潜在危险、做出正确判断并熟练操作摩托车这三大方面的错误认知和行为,以避免危险的发生;
3、根据分析,事故往往在瞬间发生,要成功避开、需要技巧和知识。分析显示,70% 的致命事故发生在 2 秒之内,我们都知道,对于一个驾驶员来说,要在如此之短的时间内、要做到避开危险并不容易。在这样的情况下,Yamaha 就催收了他们的想法:我们不应该仅仅依靠驾驶员自己的判断和技能来进行正确的规避动作,而应该尝试使用先进的辅助技术、为驾驶员提供协助。
Yamaha 这套新的 AMSAS 驾驶安全辅助系统,被厂方归纳到 Jin-Ki Kanno x Jin-Ki Anzen “ 人机功能 x 人机安全 ” 的主题之下。
基于对事故原因的分析,Yamaha 根据四个不同方向去开发驾驶辅助系统:危险预测、损伤预防和防御骑行、规避骑行动作和损伤缓解。AMSAS 于去年推出,目前具备的功能,是通过控制驱动力和转向力、来稳定车辆在低速时的姿态。正在开发的原型系统,使用量产型的 YZF-R25 作为平台,并配备了六轴 IMU(惯性测量单元),以及控制驱动和转向的执行系统。


对于这套新系统的一些特点,项目负责人 Akitoshi Suzuki 表示:“ 新系统采用了一种高度适用于现有车辆的设计,因此它不需要对车辆现有的车体进行任何修改。当(车辆)启动或者是停止时,安装在前轮上的驱动执行系统将有助于提高车辆的稳定性,从静止到最高 5 km/h 的速度,连接在车把上的转向执行系统也会接管车辆的(平衡)控制。通过两者的协调,开发中期的 AMSAS 原型车可以用一个步行的速度移动而不会摔倒,而无论车上驾驶员的技术水平如何。”
此外,Akitoshi Suzuki 和团队还对这项技术抱有很高的期望:“ 随着基础技术的到位,我们已经实现了为客户带来 AMSAS 价值的目标。从现在起,我们将努力缩小各个组件的尺寸,因为我们希望将其开发成一个不仅适用于摩托车的平台,还适用于配备到自行车等的、各种其他个人的移动应用上。”
下面的图片,Yamaha 在 2015 年公开的 MOTOBOT —— 这是一款具有自动驾驶摩托车的人形机器人概念(资料图片)。而这一概念为厂方提供并论证了很多独特的基础技术。